Within the framework of the Virtual Crater project, a test environment was developed which makes it possible to program, test and optimize robotic systems cost effectively in a realistic simulated, lunar crater landscape. The project was worked on in a collaborative effort with the German Research Centre for Artificial Intelligence (DFKI GmbH) together with the Research Institute for Research and Transfer (RIF e.V.).
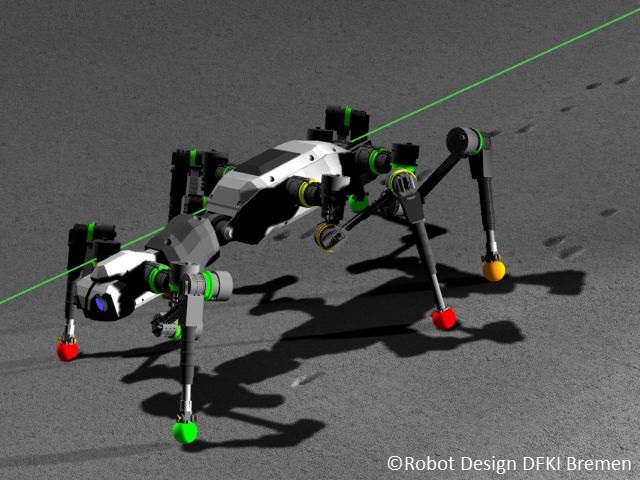
Virtual Crater is a comprehensive simulation environment, which enables missions to be programmed and tested for the exploration of the lunar surface, as well as to demonstrate innovative new concepts. Development teams, who want to develop a new walking robot or even plan entire missions, can now run through fast parallel development cycles with virtual prototypes on the basis of Virtual Crater thereby reducing development times and saving on real-life prototypes – while simultaneously boosting quality and robustness when it comes to implementation.
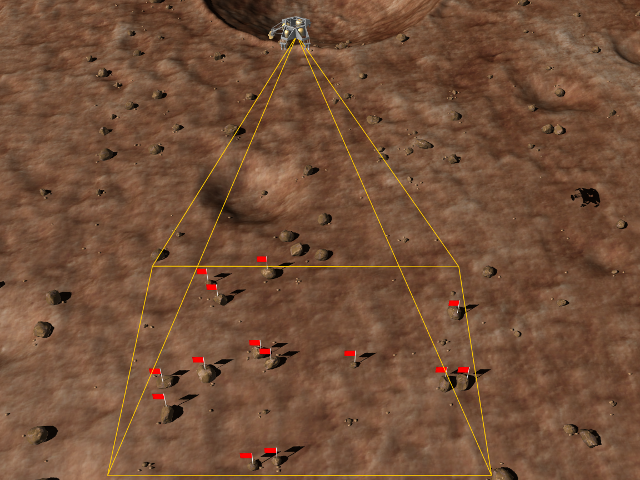
In order for this test environment to behave as realistically as possible, comprehensive physical experiments were conducted and compared with analogous simulated experiments. These reference experiments and the calibration of the individual detailed simulation models were carried out within the framework of the project, parallel to the development of the integrated simulation system and then combined in the project flow further down the line.
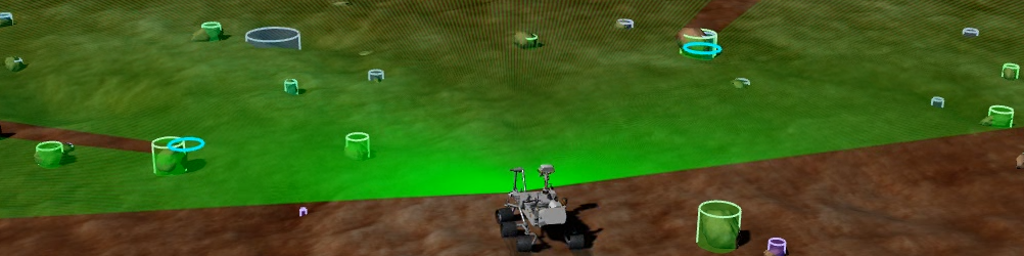
Together with special optimization tools, the simulation can be used in turn, among others and as the case may be, to optimize hardware, set up exploration scenarios and simulate appropriate missions. In so doing, it was important to be able to tether the robot control both to the simulation system and to the real-life test bed without any adaptation, so that the virtual robot, as is the case with the real-life one, is programmed and, in particular, is controlled via the same program code. In order to achieve an improved impression of immersion into the virtual world, the simulation system is deployed on a stereoscopic 3D rear projection multi-screen system (CAVE), as well as on a normal workplace computer as a self-sufficient development environment.
More Projects














{kind=link}
{kind=link}
{kind=link}
{kind=link}