“ReconCell” develops a new type of robot workcell, its required process infrastructures and the economic framework for automated robot assembly, especially designed for the needs of SMEs. SMEs would benefit from robotic automation, but often cannot use it due to set-up & maintenance complexity. This requires expert knowledge and time for configuration and programming, which is too costly for them. Robotic automation is, thus, normally economically infeasible for SMEs, especially for small batch sizes. ReconCell develops an easy to (re-)configure and (re-)program workcell, making robot solutions commercially viable even for small batch sizes (~1000 units) by reducing set-up & maintenance effort substantially.
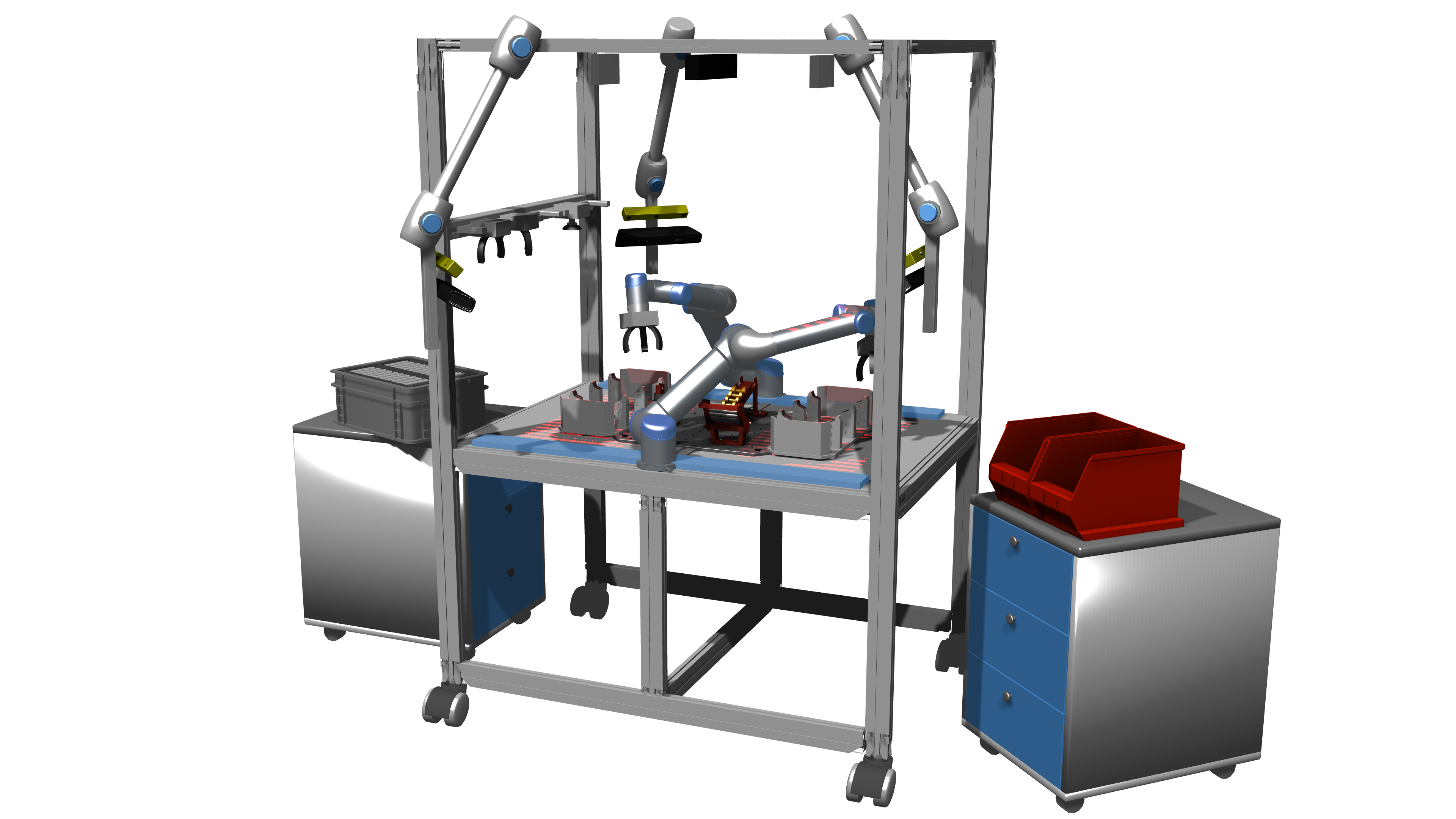
Specifically, the ReconCell System is based on a layered concept where we start together with the customer with business modelling the planned product assembly based on the ReconCell System to assess its economic viability and provide decisive Key Performance Indicators (KPIs). On approval, the next layer of the ReconCell System implements assembly with automated testing in simulation. Here we use reconfigurable hardware elements to design the required workcell layout and assembly processes. After verification, product assembly takes place in the real workcell under machine vision-based monitoring and novel force-based control of execution to assure product quality using the KPIs.
We demonstrate the capabilities of the layered ReconCell System on three real use cases provided by the SMEs of our consortium and two more use cases, established through an open call. In addition, the consortium has started to establish a network of potential ReconCell users to disseminate information about ReconCell technologies to all actors in the value chain, and to raise awareness about the possibilities of automated robot assembly in SMEs.
More Projects













{kind=link}
{kind=link}
{kind=link}