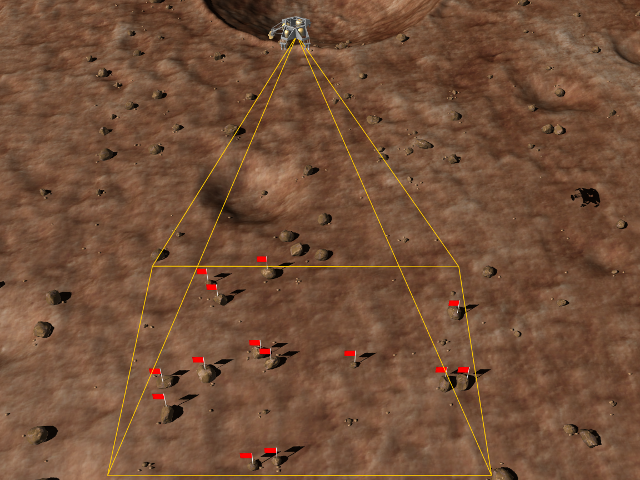
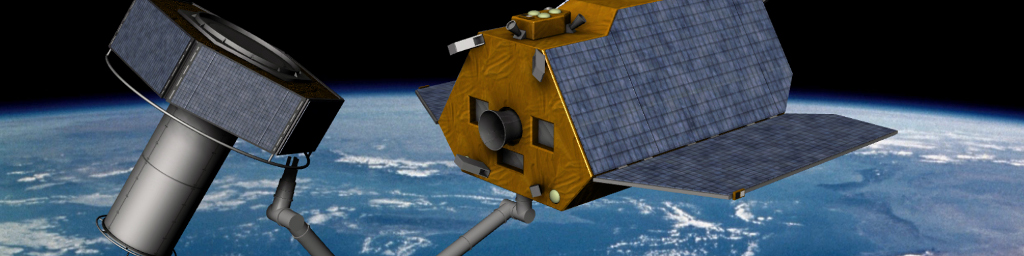
Optical sensors are indispensable in almost all space flight applications. Within the framework of robotic space missions they take on special significance. In this field high-resolution camera images or distance measurements via laser scanners form the basis both for the control of such systems by operators in the tele-operation service from the ground and for (partly) autonomous operation in space. With growing automation and a greater degree of autonomy, the demands made on the precise capturing of the surroundings through such sensors are increasing. This is because algorithms for sensor data processing, on the basis of this sensor information, provide the data foundation for automated control or are integrated in closed control loops for the purposes of the fully automated regulation of these systems. Efficient optical sensors that are also reliable in space conditions are therefore requisite for the further automation of space travel systems and the exploitation of new implementation areas for unmanned space missions associated with these.
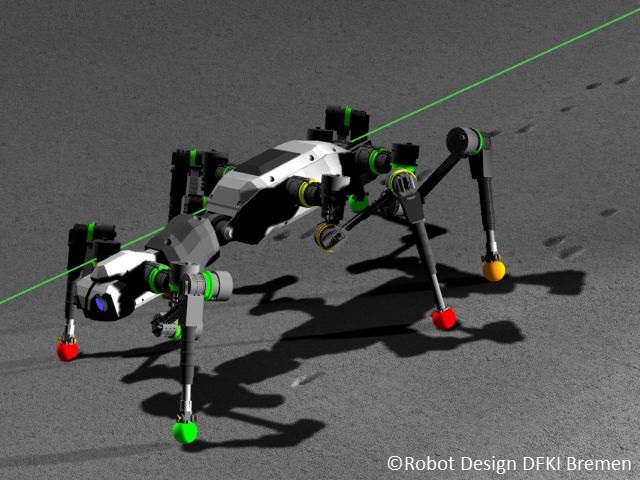
Already today the virtual space robotics test bed is deployed for the development and analysis of select algorithms (self-localization, map generation) and components (walking robot kinematics and mechanics, laser scanner). That being the case, it is the objective of ViTOS (virtual test bed for optical sensors in robotic space systems) to develop new processes for decision-making support within the framework of conceptualization, development and integration of optical sensors for robotic space travel systems on the basis of an integrated system approach. Such an approach will use techniques from the Virtual Space Robotics Test Bed frameworks and the components already available there or those that are currently in the process of being developed.
More Projects














{kind=link}
{kind=link}
{kind=link}