


Bachelor-/Masterarbeit: Parameteridentifikation zur automatisierten Konfiguration einer Sensorsimulation
Künstliche Intelligenz (KI) hält zunehmend Einzug in fortschrittliche Fahrerassistenzsysteme und autonome Fahrzeuge. Eine funktionale Absicherung solcher KI stellt Entwickler jedoch vor neue Herausforderungen. Insbesondere der zu erwartende Variantenreichtum des Fahrzeugumfelds und das situationsabhängige Verhalten der KI lässt sich im Vorfeld allein durch reale Testfahrten nur schwer bis gar nicht untersuchen. Abhilfe schafft hier der (ergänzende) Einsatz von 3D-Simulationstechnik, welche eine Untersuchung mittels virtueller Versuchsfahrten erlaubt. Neben der Umwelt- und Fahrdynamiksimulation stellt hier insbesondere die detaillierte und validierte Simulation der eingesetzten Umfeldsensorik eine wesentliche Komponente dar.
Um eine breite Anwendbarkeit der Sensorsimulation zu garantieren, bietet sich der Einsatz generischer Sensormodelle an, welche durch eine entsprechende Parametrierung auf spezifische reale Sensoren „kalibriert“ werden können. Entscheidend ist hier die systematische Parameteridentifikation und anschließende Validierung anhand des realen Sensors.

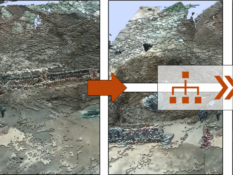
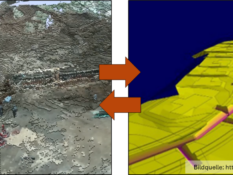
Validierung der Simulation durch Vergleich realer (oben) und simulierter (unten) Kamerabilder
anhand ihrer SURF-Feature-Bewegungen.
Vor diesem Hintergrund sollen für die Sensorsimulation des 3D-Simulationssystems VEROSIM Methoden und Verfahren entwickelt werden, welche eine systematische und automatisierte Identifikation notwendiger Kenngrößen zur Parametrierung der in VEROSIM implementierten generischen Sensormodelle erlauben.
Aufgabenbeschreibung
Im Rahmen dieser Arbeit sollen Methoden und Verfahren zur systematischen Parameteridentifikation für die automatisierte Konfiguration der Sensorsimulation entwickelt, implementiert und evaluiert werden. Hierbei soll ihre Anwendbarkeit sowohl für unterschiedliche Sensortypen (Kamera, LiDAR, Radar, etc.) untersucht werden als auch für einen konkreten Sensor validiert werden. Die sich daraus ergebenden Teilaufgaben sind wie folgt:
- Literaturrecherche zum Thema: Parameteridentifikation.
- Entwicklung von Methoden und Verfahren zur systematischen und automatisierten Parameteridentifikation für die Sensorsimulation.
- Implementierung der erarbeiteten Methoden in der Programmiersprache C++ als Plugin der Simulationssoftware VEROSIM.
- Evaluation der erarbeiteten Verfahren und des implementierten Plugins anhand eines konkreten Sensors.
Stichworte: Parameteridentifikation, Sensorik, Sensorsimulation, Automotive
Betreuer: Thieling
Weitere Arbeiten








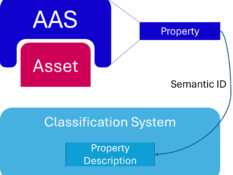
Klassifikationssystem für Merkmale Digitaler Zwillinge auf Basis der Industrie 4.0-Verwaltungsschale



Implementation of an Accelerated Projected Gradient Descent Solver for Multibody Dynamics Simulation




MA: Automatisierung der Verhandlung von digitalen Nutzungsrechten durch Self-sovereign Digital Twins






















































































