


Masterarbeit: Verallgemeinertes Framework zur Anbindung und Evaluation von Softwarebibliotheken zur Sampling-basierten Bewegungsplanung
Als „Bewegungsplanung“ wird in der Robotik der Schritt bezeichnet, kollisionsfrei ausführbare Bewegungen zwischen vorgegebenen Start- und Zielkonfigurationen zu planen. Die Vorgabe dieser Konfigurationen erfolgt dabei durch einen Anwender oder ein übergeordnetes Aktionsplanungssystem. Aufgrund der Komplexität des Planungsproblems (zum Beispiel bedingt durch komplexe Hindernisgeometrien oder komplexe Kinematiken) werden vielfach so genannte Sampling-basierte Algorithmen eingesetzt, bei denen nach verschiedenen Strategien Knotenpunkte eines kollisionsfrei befahrbaren Wegenetzes für den Roboter ermittelt werden. Mehrere dieser Algorithmen stehen als Softwarebibliotheken zum Einsatz in eigenen Roboteranwendungen zur Verfügung.
Im Rahmen dieser Arbeit soll ein Framework konzipiert und implementiert werden, um aktuelle Bibliotheken zur Sampling-basierten Bewegungsplanung in Simulationsanwendungen des MMI vergleichen zu können. Dazu soll zunächst die Leistungsfähigkeit verfügbarer Bibliotheken recherchiert werden, um zur Anbindung geeignete Algorithmen zu identifizieren. Dann sollen die Gemeinsamkeiten und Unterschiede der ausgewählten Algorithmen in den Punkten „Repräsentation von Hindernissen“, „Repräsentation von Kinematiken“, „Repräsentation von Zuständen“ und „Steuerung der Berechnungen“ herausgearbeitet werden, um im Rahmen des Frameworks ein möglichst allgemeingültiges Konzept zur Anbindung der Bibliotheken anzubieten. Schließlich sollen in ausgewählten Szenarien die Ergebnisse von mindestens zwei Bibliotheken miteinander verglichen werden.
Stichworte: Sampling-basierte Bewegungsplanung
Betreuer: Schlette
Weitere Arbeiten








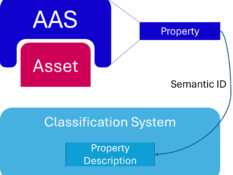
Klassifikationssystem für Merkmale Digitaler Zwillinge auf Basis der Industrie 4.0-Verwaltungsschale



Implementation of an Accelerated Projected Gradient Descent Solver for Multibody Dynamics Simulation




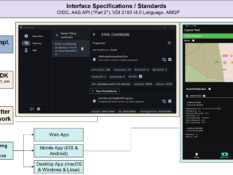
MA: Automatisierung der Verhandlung von digitalen Nutzungsrechten durch Self-sovereign Digital Twins






















































































