Am 24.10.23 fand die Abschlusspräsentation des Forschungsprojekts KImaDiZ statt. In diesem Verbundvorhaben entwickelte das MMI gemeinsam mit dem RIF e.V. und den Firmenpartnern FEV.io GmbH und Jena Optronik Methoden zum Training und zur Validierung von KI-Systemen. Hierzu wurden Methoden entwickelt, um zunächst standardkonform relevante Klassen von Anwendungsszenarien zu beschreiben, hieraus dann mit Hilfe Experimentierbarer Digitaler Zwillinge eine Vielzahl ausführbarer Simulationen abzuleiten, diese dann auf Rechenclustern massiv-parallel zu simulieren und abschließend unter unterschiedlichen Gesichtspunkten auszuwerten. Für unterschiedliche Anwendungsbereiche vom Explorationsrover und das Rendezvous & Docking im Weltraum bis zu Stau- und Einparkassistenten im Automobilbereich konnten so in kurzer Zeit in großem Umfang Trainings- und Validierungsdaten generiert werden. Damit realisiert KImaDiZ völlig neue Variations-, Analyse- und Validierungsmöglichkeiten für den kompletten Lebenszyklus von KI-basierten Anwendungen
Mit dem übergeordneten Ziel, das Vertrauen in KI systematisch zu erhöhen, wurde eine massiv-parallele Architektur für Virtuelle Testbeds entwickelt, um eine Vielzahl möglicher Interaktionen zwischen hoch-realistischen und -detaillierten Digitalen Zwillingen im Kontext von KI-Systemen zu simulieren. Die Architektur erreicht die folgenden neuartigen Ziele im Bereich der KI-Entwicklung und -Validierung:
- Nutzung und Erweiterung von domänenübergreifenden Industriestandards für formalisierte Szenarien (Definition eines „Explorationsraums“ für KI-Anwendungen) in Kombination mit Experimentierbaren Digitalen Zwillingen (Definition von Simulationseinheiten)
- Entwicklung von Methoden zur kontinuierlichen Qualitätssicherung von KI-Systemen auf der Basis formalisierter und automatisch ausgewerteter KPIs (Key Performance Indicators) aus den Ergebnissen massiv-paralleler Simulationen
- Entwicklung von Methoden zur gezielten Auswahl und Simulation von relevantem Systemverhalten, einschließlich „Corner Cases“ (z.B. seltene Ausfallereignisse von KI-Systemen)
Die Methoden wurden in Zusammenarbeit mit den Verbundpartnern erfolgreich auf drei domänenübergreifende Anwendungen angewendet:
- Validierung eines ADAS („Advanced driver assistance systems“)-Funktion: Gemeinsam mit FEV.io wurde der KI-basierte „Stauassistent“ umfassend validiert und Strategien für dessen Weiterentwicklung und Training konkretisiert.

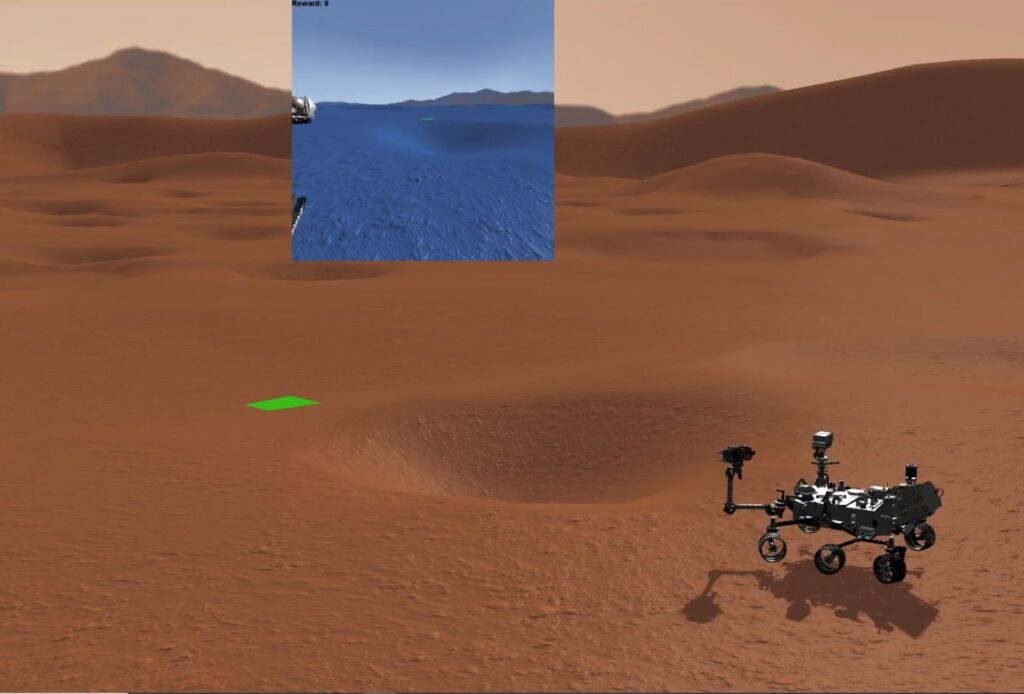
- Autonomer MARS-Rover: Gemeinsam mit RIF e.V. wurde ein autonomer Rover trainiert, mit Hilfe einer Onboard-Kamera und Laserscanner sicher auf einem extraterrestrischen Planeten zu navigieren. Das Training wurde mit einem Reinforcement Learning Framework innerhalb der Virtual Testbeds durchgeführt.
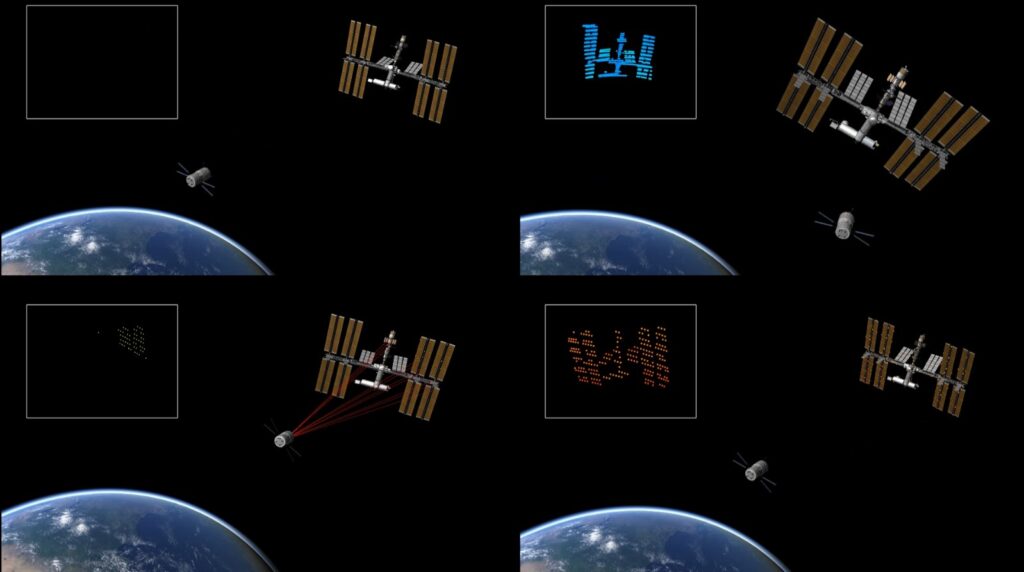
- Rendezvous- und Andockmanöver auf der ISS: Mit dem Experimentierbaren Digitalen Zwilling des RVS3000 LiDAR wurden verschiedene LiDAR-Trainingsdaten für das automatische Rendezvous- und Andockmanöver auf der Internationalen Raumstation erzeugt. Die Firma Jena Optronik, Hersteller des LiDAR, nutzte die Daten zur Auswertung und zum Training ihrer KI-basierten Algorithmen zur Posenschätzung.