


Masterarbeit: Entwicklung und Implementierung eines Fahrassistenzsystems auf Basis von LiDAR-Daten
In heutigen Fahrzeugen kommen bereits eine Vielzahl von Sensoren zum Einsatz, welche die Basis für unterschiedlichste Fahrassistenzsysteme bilden. Während Kamera, Radar und Ultraschallsensoren im Automotivebereich mittlerweile zum Stand der Technik gehören, ist der Einsatz von LiDAR-Sensoren (Light Detection and Ranging) aktueller Gegenstand der Forschung. Aufgrund ihrer hohen Auflösung besitzen LiDAR-Sensoren ein großes Potenzial hinsichtlich der Entwicklung autonomer Fahrzeuge, weshalb bereits namhafte Automobilhersteller die Nutzung dieser Technik in zukünftigen Fahrzeugen angekündigt haben.

Vor diesem Hintergrund sollten bereits heute leistungsfähige Fahrassistenzsysteme entwickelt werden, welche auf Basis von LiDAR-Daten agieren und den Weg für das autonome Fahren ebnen. Hierbei kann zunächst auf simulierte LiDAR-Daten zurückgegriffen werden, welche in der Simulationssoftware VEROSIM zur Verfügung stehen (siehe oben). Anschließend sollen die Ergebnisse durch reale Messdaten mit dem LiDAR-Sensors des MMI (siehe unten) validiert werden.

Aufgabenbeschreibung
Im Rahmen dieser Arbeit soll ein Fahrerassistenzsystem zur Warnung vor Kollisionen mit der in Fahrtrichtung liegenden Umwelt entwickelt, implementiert und evaluiert werden. Hierbei soll sowohl auf simulierte als auch auf reale LiDAR-Daten zurückgegriffen werden. Die sich daraus ergebenden Teilaufgaben sind wie folgt:
- Literaturrecherche zum Thema: Fahrerassistenzsysteme zur Warnung vor Kollisionen.
- Entwicklung eines geeigneten Systems zur Warnung vor Kollisionen mit der in Fahrtrichtung liegenden Umwelt.
- Implementierung des Systems in der Programmiersprache C++ als Plugin der Simulationssoftware VEROSIM.
- Evaluation des implementierten Systems anhand simulierter und realer Testszenarien.
Stichworte: Fahrassistenzsystem, Automotive, Sensorik, LiDAR
Betreuer: Thieling
Weitere Arbeiten







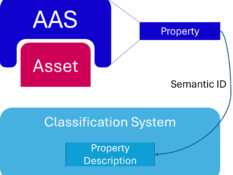
Klassifikationssystem für Merkmale Digitaler Zwillinge auf Basis der Industrie 4.0-Verwaltungsschale



Implementation of an Accelerated Projected Gradient Descent Solver for Multibody Dynamics Simulation




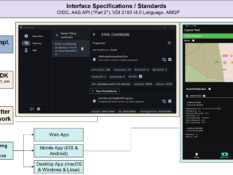
MA: Automatisierung der Verhandlung von digitalen Nutzungsrechten durch Self-sovereign Digital Twins






















































































