


Nach der Teilnahme an dieser Veranstaltung sind die Studierenden in der Lage,
- typische Komponenten der Sensorik und Aktorik von Robotersystemen einzuordnen und ihre Funktionsweise zu verstehen,
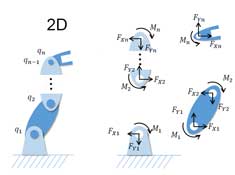
- die Verfahren nach „Newton-Euler“ und „Lagrange“ zur dynamischen Analyse von Starrkörpersystemen für Roboter systematisch anzuwenden,
- Regelungsaufgaben bei der Bewegungssteuerung von Robotern zu analysieren,
- grundlegende Verfahren zur der Regelung von Robotern zu anzuwenden,
- Problemstellungen der Verwaltung und Verarbeitung von sicherem und unsicherem Wissen zu analysieren,
- grundlegende Verfahren des maschinellen Lernens aus Daten anzuwenden und
- die Kalküle der Aussagen- und Prädikatenlogik zu verstehen und anzuwenden.
RWTHmoodle
Weitere Vorlesungen
Die Vorlesung GGI-II schließt an die Vorlesung „Grundgebiete der Informatik...

Im Rahmen dieser Veranstaltung lernen die Studierenden unter anderem die...
Nach der Teilnahme an dieser Veranstaltung sind die Studierenden in...

Die Vorlesung ist Teil des Hauptdiploms für Studenten des Maschinenbaus...

Das Institut für Mensch-Maschine-Interaktion (MMI) bietet im Sommersemester 2017 die...

