


Bachelor-/Masterarbeit: Ray-Tracing-basierte Radarsensor-Simulation
Umfeld-Sensoren sind die Schlüsseltechnologie zur Realisierung fortschrittlicher Fahrerassistenzsysteme in modernen Fahrzeugen. So ermöglicht der Einsatz von Radar (Radio Detection and Ranging) -sensoren bereits heute Funktionen wie den aktiven Notbrems- oder Toter-Winkel-Assistenten. Aufgrund ihrer Robustheit auch bei schlechten Sichtverhältnissen (z.B. Nebel) und der Fähigkeit zur Ermittlung von Relativgeschwindigkeiten anderer Verkehrsteilnehmer, sind Radarsensoren wichtige Komponenten zukünftiger Fahrerassistenzsysteme und autonomer Fahrzeuge.
Um in diesem Bereich zukünftige Entwicklungen maßgeblich zu unterstützen, bietet sich der Einsatz von 3D-Simulationstechnik an. Ein zentraler Aspekt ist hier neben der Umwelt- und Fahrdynamiksimulation die detaillierte Simulation der eingesetzten Umfeld-Sensoren.

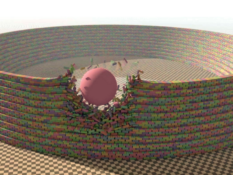
Vor diesem Hintergrund soll die Sensorsimulation des 3D-Simulationssystems VEROSIM um einen Ray-Tracing-basierten Radarsensor erweitert werden. Der Einsatz von Ray-Tracing Algorithmen soll hierbei nicht nur den Detailgrad der bisherigen rasterbasierten Radarsensorsimulation signifikant erhöhen sondern darüber hinaus auch die Skalierbarkeit der Simulation sicherstellen und Rechenzeiten reduzieren.
Aufgabenbeschreibung
Im Rahmen dieser Arbeit soll ein Radarsensor-Simulationsmodell entwickelt, implementiert und evaluiert werden. Hierbei sollen sowohl die Einflüsse der Antennencharakteristik und weiterer real auftretender Störgrößen als auch die über den Dopplereffekt messbaren Relativgeschwindigkeiten detektierter Objekte berücksichtigt werden. Die sich daraus ergebenden Teilaufgaben sind wie folgt:
- Literaturrecherche zum Thema: Physikalische Modelle zur Beschreibung eines Radarsensors.
- Entwicklung eines geeigneten physikalisch-basierten Simulationsmodells auf Basis von Ray-Tracing Algorithmen.
- Implementierung des Simulationsmodells in der Programmiersprache C++ als Plugin der Simulationssoftware VEROSIM.
- Evaluation des implementierten Simulationsmodells sowohl anhand simulierter als auch realer Testszenarien.
Stichworte: Fahrassistenzsystem, Automotive, Sensorik, RADAR
Betreuer: Thieling
Weitere Arbeiten







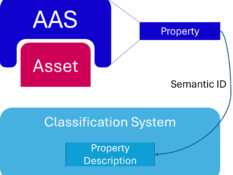
Klassifikationssystem für Merkmale Digitaler Zwillinge auf Basis der Industrie 4.0-Verwaltungsschale



Implementation of an Accelerated Projected Gradient Descent Solver for Multibody Dynamics Simulation




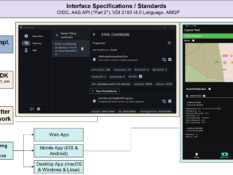
MA: Automatisierung der Verhandlung von digitalen Nutzungsrechten durch Self-sovereign Digital Twins






















































































