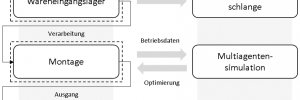
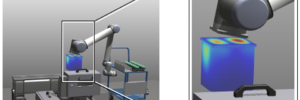
Klein- und mittelständische Unternehmen im produzierenden Gewerbe sind zumeist auf flexible Montagesysteme mit einem niedrigen Automatisierungsgrad und einem großen Einfluss… Weiter »
![]()
![]()



Klein- und mittelständische Unternehmen im produzierenden Gewerbe sind zumeist auf flexible Montagesysteme mit einem niedrigen Automatisierungsgrad und einem großen Einfluss… Weiter »

Bachelorarbeit: Path planning for mobile LiDAR in outdoor environments Als Teil der modernen Überwachung von Forstgebieten, werden terrestrische Laserscans eingesetzt…. Weiter »

Punktwolken, ob durch Laserscanner oder durch kamerabasierter 3D Rekonstruktion erzeugt, spielen eine große Rolle beim Erfassen unserer Umgebung. Punktwolken haben… Weiter »
Automatisierte Dokumentation Digitaler Zwillinge
Architektur zur generischen Beschreibung von Szenarioverhalten

Im Rahmen dieser Arbeit soll das Konzept Experimentierbarer Digitaler Zwillinge auf ereignisdiskrete Simulationsansätze erweitert werden. Hierzu sollen zunächst der Stand der Technik im Bereich ereignisdiskreter und agentenbasierter Simulation analysiert und existierende Modellierungskonzepte (z.B. Product-Process-Resource oder Modules-Entities-Process) gegenübergestellt werden. Auf dieser Grundlage soll untersucht werden, auf welcher strukturellen und semantischen Ebene das Konzept der Experimentierbaren Digitalen Zwillinge mit diesen Ansätzen zusammengeführt werden kann. Für eine gewählte Realisierung sollen dann ein Prototyp basierend auf einer Petrinetz-basierten Beschreibungssprache umgesetzt und die Vor- und Nachteile gegenüber herkömmlichen Ansätzen untersucht werden. Hierzu sollen Beispiele aus den Bereichen Produktionstechnik, Forst- und Bauwirtschaft sowie der Weltraumrobotik betrachtet werden.

Im Rahmen der Modellierung von Kinematiken werden Gelenkkörper modelliert und durch aktive/passive Gelenke (Schub, Kugel, Kardan u.ä.) miteinander verbunden. Die aktiven Gelenke (z.B. die Schubstange eines Hydraulikzylinders) werden von geeigneten Steuerungsalgorithmen gestellt, die hierfür oft detaillierte Informationen über die Kinematik benötigen (z.B. für die Rücktransformation).
 Bachelor-/Masterarbeit: Fundierte Analyse des Verhaltens eines Bauteils im Gesamtsystem (z.B. Teil eines Kranarms) mittels gekoppelter FEM und Mehrkörpersimulation Welchen Einfluss... Weiter »
Bachelor-/Masterarbeit: Fundierte Analyse des Verhaltens eines Bauteils im Gesamtsystem (z.B. Teil eines Kranarms) mittels gekoppelter FEM und Mehrkörpersimulation Welchen Einfluss... Weiter »

Ein grundlegendes Konzept von Industrie 4.0 ist die Vernetzung aller Objekte (Produktionsmaschinen, Produkte …), die für einen Betrieb von Wert… Weiter »
Master / Bachelor thesis: Swarm algorithm for the adjustment of a textile machine In T-EXDIZ the experimentable digital twin of… Weiter »
