


Realistic simulation of urban landscapes, vehicle dynamics, sensors and traffic flow has opened the door to myriad automotive applications within the virtual domain. Experimentable Digital Twins developed at MMI offers capabilities in all the above-mentioned domains within comprehensive virtual testbeds, as well as co-simulation functionalities with traffic simulation tools like SUMO. Within the scope of this thesis, a modular AI-based vehicle driver will be developed to safely and efficiently navigate a vehicle digital twin within an urban environment populated with diverse traffic participants.
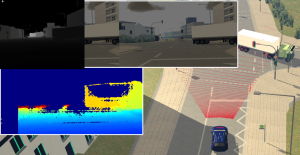
Figure 1: Experimentable digital twins of vehicles and sensors in VEROSIM
The thesis involves the following tasks:
- Selection and preparation of appropriate training data sets from public sources
- Integration of an object detection plugin based on virtual camera and/or lidar scans of the environment
- Development and integration of a safe and efficient path-following driver model
- Testing the developed driver against traffic models offered e.g. through SUMO or CARLA
You should additionally bring the following skills with you:
- A very good knowledge of C++
- Good knowledge of Machine Learning fundamentals
- Interest in working with vehicular technologies
Supervisor: Maqbool
