


Masterarbeit: Entwicklung sicherer Fahralgorithmen für einen autonomen Roboter mit Differentialantrieb zur Vermeidung von Verklemmungen in der Nähe von Hindernissen
Mobile Roboter werden oft mit einem Differentialantrieb ausgestattet, der aus zwei angetriebenen Rädern besteht, die seitlich angebracht sind. Dies ermöglicht dem Roboter sowohl sich vor und zurück zu bewegen, als auch auf der Stelle zu drehen, was die Navigation besonders einfach macht. Wenn jedoch der Antrieb nicht mittig angebracht ist und der Roboter nicht kreissymmetrisch ist, dann ist eine Drehung auf der Stelle in der Nähe von Hindernissen nicht ohne Einschränkung möglich.
In dieser Arbeit sollen verschiedene Navigationsmethoden von mobilen Robotern untersucht werden im Hinblick auf die Anwendbarkeit bei autonomen Robotern. Besonders soll die Behandlung von Situationen betrachtet werden, in denen der Roboter sich nicht vollständig frei bewegen kann, sondern durch Objekte in der Umgebung aufgrund der Roboterform daran gehindert ist. Anschließend soll eine Methode für einen nicht kreissymmetrischen autonomen Roboter mit Differentialantrieb implementiert werden.
Eurobot ist ein Internationaler Wettbewerb für junge Hobbybastler, in dem diese für eine jährlich wechselnde Thematik autonome Roboter konstruieren und gegeneinander in einem 90-sekunden-langen Match antreten lassen. Von vergangenen Wettbewerben stehen einige Roboter für Experimente bereit, jedoch wird schon an dem Roboter für die nächste Runde gebastelt, der mit den Ergebnissen dieser Arbeit angereichert werden könnte. Der Roboterclub Aachen lädt zur Mitarbeit ein.
Stichworte: Autonome Roboter, Differentialantrieb, Hindernisbehandlung
Betreuer: Grinshpun
Weitere Arbeiten








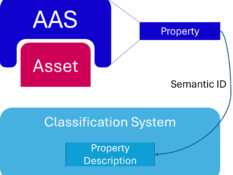
Klassifikationssystem für Merkmale Digitaler Zwillinge auf Basis der Industrie 4.0-Verwaltungsschale
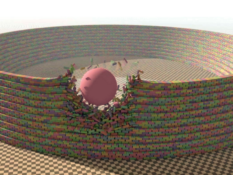



Implementation of an Accelerated Projected Gradient Descent Solver for Multibody Dynamics Simulation




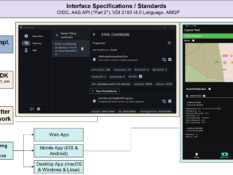
MA: Automatisierung der Verhandlung von digitalen Nutzungsrechten durch Self-sovereign Digital Twins






















































































