Masterarbeit: Dynamische Simulation von „Peg in Hole“-Prozessen in der Montage.
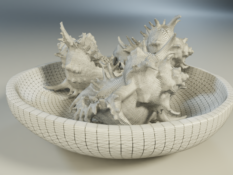
Nach wie vor gilt das Fügen von Objekten in Führungen (engl. „Peg in Hole“, PnH) als zentraler Montageschritt in der industriellen Produktion, z.B. bei der Montage von Gehäusen. PnH-Szenarien sind damit ein wichtiger Schwerpunkt in der roboterbasierten Montage und es wurden zahlreiche Ansätze entwickelt, PnH-Szenarien automatisiert, unter Einbezug von Sensorfeedback, mit Robotern umzusetzen.
Am MMI befinden sich neuartige PnH-Ansätze in der Entwicklung, die auf der Grundidee der „Simulation-based control“ beruhen: Ausgehend von einem umfangreichen Verständnis der Situation in simulierbaren, virtuellen 3D Modellen, werden reale Roboter direkt aus der Simulation heraus gesteuert. Am MMI steht dazu im Kontext des Simulationssystems VEROSIM insbesondere eine „Physics Engine“ zur Verfügung, mit der hier eine dynamische Simulation von PnH-Prozessen, inklusive Roboter, Sensorik und Montagematerial erstellt werden soll, um entsprechende PnH-Ansätze der „Simulation-based control“ für reale Monateszenarien zu entwickeln.
Stichworte: Kontaktsimulation, Montagesimulation, Simulation-based control
Betreuer: Schlette
Weitere Arbeiten

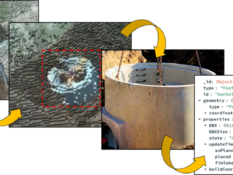







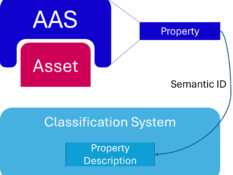
Klassifikationssystem für Merkmale Digitaler Zwillinge auf Basis der Industrie 4.0-Verwaltungsschale



Implementation of an Accelerated Projected Gradient Descent Solver for Multibody Dynamics Simulation




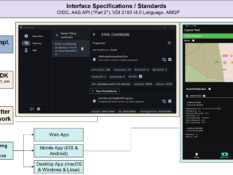
MA: Automatisierung der Verhandlung von digitalen Nutzungsrechten durch Self-sovereign Digital Twins























































































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}