


Masterarbeit: Modellierung und Simulation kinematischer Bäume mittels Experimentierbarer Digitaler Zwillinge
Ein Experimentierbarer Digitaler Zwilling (EDZ) ist eine virtuelle digitale 1-zu-1-Repräsentation (Semantik, Struktur, Verhalten, Interaktion) seines Realen Zwillings (RZ) durch ein experimentierbares Modell. Mit EDZ wird es möglich, reale Module (die Realen Zwillinge wie z.B. reale Sensoren, Aktoren, Kranelemente, Robotergelenkkörper u.ä.) 1-zu-1 in virtuelle Module in der virtuellen Welt abzubilden und dort wie in der Realität zusammenzuführen (z.B. zu einem Roboter oder einem Hydraulikkran). Grundlage der Zusammenführung sind die Schnittstellen der EDZ, die üblicherweise physikalischen Schnittstellen (z.B. mechanisch, elektrisch, datentechnisch) entsprechen. Zur Simulation bringen die virtuellen Module die notwendigen Elemente zu deren Simulation in unterschiedlichen Domänen (z.B. Kinematik, Starrkörperdynamik, Sensorik, Steuerungstechnik, Kommunikation u.ä.) mit. Im Rahmen der Vorbereitung der Simulation werden diese Elemente zusammengeführt, so dass Simulationsmodelle in den genannten Domänen entstehen, die miteinander im Rahmen der Co-Simulation ausgeführt werden.
Im Rahmen der Modellierung von Kinematiken werden Gelenkkörper modelliert und durch aktive/passive Gelenke (Schub, Kugel, Kardan u.ä.) miteinander verbunden. Die aktiven Gelenke (z.B. die Schubstange eines Hydraulikzylinders) werden von geeigneten Steuerungsalgorithmen gestellt, die hierfür oft detaillierte Informationen über die Kinematik benötigen (z.B. für die Rücktransformation).
Die Herausforderung bei der Kinematiksimulation ist, die Modellinformationen geeignet vorzuverarbeiten, so dass aus den resultierenden Abhängigkeiten die Berechnungsvorschriften für die passiven Gelenke automatisch abgeleitet werden können. Aktuell sind hierfür häufig aufwändige Rechnungen notwendig. Diese Berechnungsvorschriften müssen dann geeignet in die Gesamtsystemsimulation integriert werden, so dass ein Stellen aktiver Achsen automatisch zu einer entsprechenden Bewegung passiver Achsen führt.
Im Rahmen dieser Arbeit sollen zunächst bestehende Ansätze zur Modellierung (z.B. Constraints in CAD-Systemen oder die Kinematikbeschreibung in AutomationML) und Simulation kinematischer Systeme untersucht werden. Hieraus sollen die notwendigen Elemente zur Modellierung der EDZ und ihrer Schnittstellen abgeleitet werden. Die hierdurch implizit modellierten kinematischen Bäume müssen dann analysiert und geeignete Berechnungsvorschriften für aktive und passive Gelenke abgeleitet werden. Das Ergebnis muss dann in die Simulation integriert werden. Die Arbeiten sollen für einen Industrieroboter, eine Textilmaschine und einen Hydraulikkran durchgeführt werden.
Zur Durchführung der Arbeiten kann auf die Simulationsplattform VEROSIM und die dort vorhandenen Verfahren zur Modellierung und Simulation kinematischer Bäume zurückgegriffen werden.
Stichworte: Experimentierbare Digitale Zwillinge, Simulation, Kinematik
Betreuer: Schluse
Weitere Arbeiten








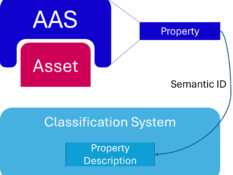
Klassifikationssystem für Merkmale Digitaler Zwillinge auf Basis der Industrie 4.0-Verwaltungsschale



Implementation of an Accelerated Projected Gradient Descent Solver for Multibody Dynamics Simulation




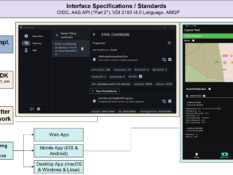
MA: Automatisierung der Verhandlung von digitalen Nutzungsrechten durch Self-sovereign Digital Twins






















































































