


Bachelor-/Masterarbeit: Maschinelles Lernen für Autonome Fahrzeuge: Evaluierung und Validierung mittels simulierter Sensordaten und X-in-the-Loop
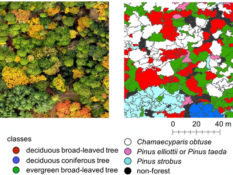
Zur erfolgreichen Navigation autonomer Fahrzeuge ist eine korrekte Perzeption und Interpretation des Umfelds entscheidend. Während Umfeldsensoren wie Kamera und Lidar eine Perzeption des Umfelds erlauben, übernehmen nachgelagerte Algorithmen zur künstlichen Intelligenz (KI) die Interpretation dieser. So liefert der Stand der Technik bereits vielzählige Ansätze zur Detektion und Klassifikation von Verkehrsteilnehmern, Ampelanlagen und Fahrspuren.

Umfeldperzeption und -interpration autonomer Fahrzeuge (Quelle: NVIDIA).
Die Evaluierung und funktionale Validierung dieser Kombination aus Sensorik und KI ist jedoch aufgrund der Vielzahl möglicher Szenarien und dem Variantenreichtum des Umfelds allein auf Basis realer Fahrversuche nur schwer zu erzielen. Abhilfe soll hier der ergänzende Einsatz von virtuellen Fahrversuchen mittels simulierten Sensordaten und X-in-the-Loop (XiL) schaffen.
Aufgabenbeschreibung
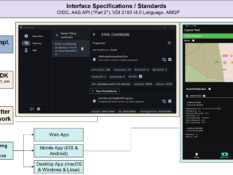
Vor diesem Hintergrund ist das Ziel dieser Arbeit die Untersuchung von virtuellen Methoden zur Evaluierung und Validierung künstlicher Intelligenz. Hierzu sollen KI Algorithmen aus dem Stand der Technik (z.B. NVIDIA Drive) angebunden und XiL-Schnittstellen entwickelt werden, die eine Evaluierung mittels simulierter Sensordaten erlauben.
Die sich daraus ergebenden Teilaufgaben sind wie folgt:
- Literaturrecherche mit Fokus auf X-in-the-Loop (XiL)
- Konzeptionierung von Schnittstellen zur Anbindung und Evaluierung künstlicher Intelligenz mittels simulierter Sensordaten
- Implementierung des entwickelten Konzepts (z.B. als Plugin des 3D-Simulationssystems VEROSIM)
- Anbindung repräsentativer Algorithmen zur künstlichen Intelligenz (z.B. unter Nutzung der NVIDIA Drive Plattform)
- Anwendung und Bewertung des implementierten Ansatzes
Stichworte: Automatisiertes Fahren, Sensorsimulation, X-in-the-Loop, virtuelle Validierung
Betreuer: Thieling
Weitere Arbeiten
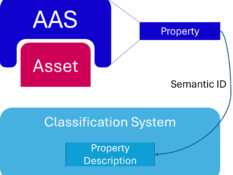
Klassifikationssystem für Merkmale Digitaler Zwillinge auf Basis der Industrie 4.0-Verwaltungsschale




Implementation of an Accelerated Projected Gradient Descent Solver for Multibody Dynamics Simulation




MA: Automatisierung der Verhandlung von digitalen Nutzungsrechten durch Self-sovereign Digital Twins






















































































