


Bachelor/Masterarbeit
Model in the Loop (MiL) ist die Simulation eines eingebetteten Systems in einer frühen Entwicklungsphase der Modellierung im Bereich der modellbasierten Softwareentwicklung. Eingebettete Systeme kommunizieren mit ihrer Umwelt und erwarten häufig plausible Sensorsignale als Eingang und stimulieren dann das physikalische System. Um richtig zu funktionieren, muss die Umgebung des eingebetteten Systems simuliert werden. Wird nun das eingebettete System (Modell) in einer Schleife zusammen mit dem Umgebungsmodell simuliert, spricht man von MiL-Simulation [1].
In „Rendezvous und Docking“ (RvD) Szenarien der Weltraumrobotik geht es um den (möglichst automatisierten) Anflug und das nachfolgende Andocken zweier Raumfahrzeuge, z.B. des Automated Transfer Vehicle (ATV) an die Internationale Raumstation ISS. Dabei kommen sogenannte GNC-Systeme (für „guidance, navigation and control“) zum Einsatz, die aus Sensordaten die relative Lage zwischen Satellit und Dockingport bestimmen, um eine entsprechende Bahnplanung sowie Lageregelung durchzuführen. Häufig kommt dabei ein LIDAR-Sensor zum Einsatz.
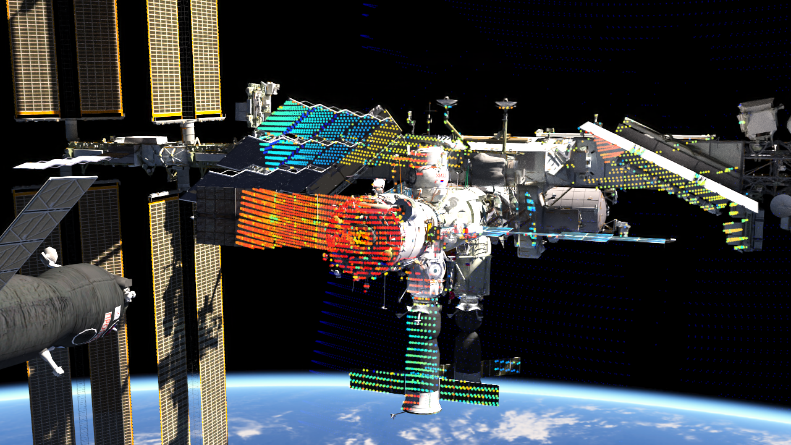
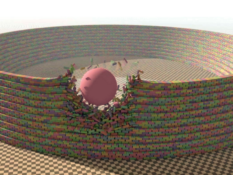
Punktwolke eines 3D-LIDAR-Scans während eines simulierten RvD-Manövers.
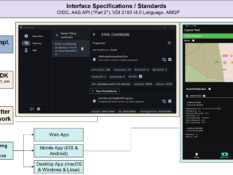
In dieser Arbeit soll der Einsatz von MiL-Technologie im Rahmen solcher RvD-Szenarien evaluiert werden. Dazu steht als Hardware eine SCALEXIO LabBox der Firma dSPACE zur Verfügung [2]. Fokus soll die Entwicklung einer modularen und wiederverwendbaren Architektur für MiL-Simulationen unter Einbindung der SCALEXIO LabBox via Ethernet sein. Als Anwendungsbeispiel soll ein prototypisches GNC-System Entwickelt werden, welches simulierte LIDAR-Daten (optional mit Posenschätzungen) erhält und daraus Sollwerte für die Schubdüsen des Satelliten während des RvD-Manövers berechnet. Software-Komponenten für Sensor- und Starrkörpersimulation sowie für Orbitaldynamik existieren bereits und sollen verwendet werden.
Bei der Evaluation des MiL-Systems soll insbesondere die Echtzeitfähigkeit des entwickelten Aufbaus untersucht werden. Zum Vergleich könnte ein auf einem Raspberry Pi basierendes System prototypisch entwickelt und untersucht werden. Als weitere Anwendungsszenarien sind auch Beispiele aus dem Kontext Automotive denkbar.

dSPACE SCALEXIO LabBox [2].
Betreuer: Dipl.-Phys. Linus Atorf, Mail: , Tel.: 0241 80-26106
[1] Wikipedia: Model in the Loop. https://de.wikipedia.org/wiki/Model_in_the_Loop
[2] dSPACE SCALEXIO LabBox. https://www.dspace.com/de/gmb/home/products/hw/simulator_hardware/scalexio/scalexio_labbox.cfm
Weitere Arbeiten








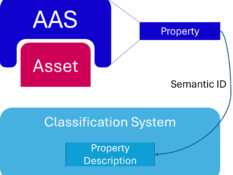
Klassifikationssystem für Merkmale Digitaler Zwillinge auf Basis der Industrie 4.0-Verwaltungsschale



Implementation of an Accelerated Projected Gradient Descent Solver for Multibody Dynamics Simulation




MA: Automatisierung der Verhandlung von digitalen Nutzungsrechten durch Self-sovereign Digital Twins






















































































