


Masterarbeit: Neuronale Netzwerke zur Klassifikation und Generierung realitätsnaher simulierter Sensordaten
Die Entwicklung von weitreichenden Fahrerassistenzsystemen bis hin zu autonomen Fahrzeugen setzt verstärkt auf Machine Learning in Form von Deep Neural Networks (DNNs), um die Menge an Informationen von LiDAR, Kamera und weiteren Sensoren umfassend und in Echtzeit auszuwerten. Zum Training solcher DNNs werden riesige Datenmengen benötigt. Eine vielversprechende Möglichkeit um an Daten von seltenen, aber sicherheitskritischen Ereignissen zu kommen (z.B. Vorderfahrzeug bremst stark, Fußgänger läuft auf die Straße etc.), ist die Simulation von Fahrszenarien mit den entsprechenden simulierten Sensordaten.
Kritisch ist jedoch die Realitätsnähe der simulierten Daten, oft als „Simulation-to-Reality Gap“ bezeichnet: DNNs neigen dazu Muster in den simulierten Daten zu finden, die in realen Szenarien nicht auftreten, was zu ungewünschten Effekten bis hin zu gänzlichem Fehlverhalten führen kann.
Aufgabenbeschreibung
Ziel dieser Arbeit ist die simulierten Sensordaten möglichst realistisch nachzubearbeiten, sodass sich diese nur schwer von realen Daten unterscheiden lassen. Generative Adversarial Networks (GANs) sind ein vielversprechender Ansatz um neuronale Netzwerke sowohl zur Generierung realistischer Daten, als auch zur Unterscheidung synthetischer und realer Datensätze zu verwenden: Während ein Modell lernt realitätsnahe Daten zu generieren, lernt das andere Modell diese von realen Daten zu unterscheiden. Bei gut abgestimmten Lernraten verbessern sich die beiden Modelle gegenseitig.

Damit ergeben sich die folgenden Teilaufgaben:
- Literaturrecherche zum Thema Generierung realistischer Sensordaten, zu Machine Learning Methoden in Simulationen und Generative Adversarial Networks
- Entwurf und Evaluierung von Metriken zur Bewertung der Realitätsnähe erzeugter Sensordaten
- Entwicklung einer Neuronalen Netzwerk Architektur zur Generierung realistischer Sensordaten basierend auf simulierten Datensätzen
- Implementierung des Modells zur Generierung realistischer Sensordaten basierend auf vereinfacht simulierten Sensordaten in der Programmiersprache C++ als Plugin der Simulationssoftware VEROSIM
- Verifikation und Evaluation des entwickelten Modells anhand verschieden komplexer Szenarien in der Simulation.
Stichworte: Fahrassistenzsystem, Automotive, Sensorik, Kamerasimulation, GAN
Betreuer: Thieling
Weitere Arbeiten





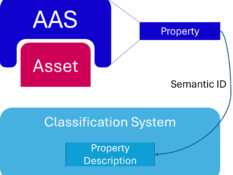
Klassifikationssystem für Merkmale Digitaler Zwillinge auf Basis der Industrie 4.0-Verwaltungsschale




Implementation of an Accelerated Projected Gradient Descent Solver for Multibody Dynamics Simulation




MA: Automatisierung der Verhandlung von digitalen Nutzungsrechten durch Self-sovereign Digital Twins






















































































