


Bachelor-/Masterarbeit: Untersuchung und systematischer Vergleich von Tiefensensoren
Nach seiner Produkteinführung im Jahr 2010 hat der Kinect-Sensor der Firma Microsoft, der ursprünglich als Eingabegerät für Computerspiele gedacht war, zu einer Revolution im Bereich des maschinellen Sehens geführt, insbesondere auch bei Verwendung in der mobilen Robotik. Aufgrund der Massenproduktion und neu entwickelter Technologien konnte der Preis bis dato bekannter Tiefensensoren (meist PMD-Kameras) um eine Größenordnung unterboten werde, was zu einer weiten Verbreitung führte. Die zweite Generation des Kinect-Sensors (Version für PCs verfügbar seit Mitte 2014) bietet verbesserte Features und arbeitet mit einer anderen Technik (jetzt „Time-of-Flight“, vorher kam strukturierte Beleuchtung zum Einsatz).

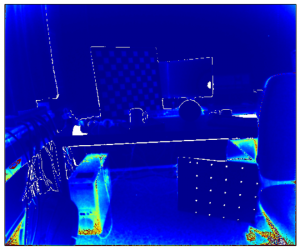
Im Rahmen dieser Bachelor- oder Masterarbeit sollen die Fähigkeiten verschiedener Tiefenkameras am Beispiel der „Kinect for Windows v1 und v2“-Sensoren systematisch untersucht und verglichen werden; außerdem steht am MMI eine PMD-Tiefenkamera für weitere Vergleiche zur Verfügung. Fokus der Arbeit soll auf Entwurf, Aufbau, Durchführung und Auswertung von reproduzierbaren Experimenten liegen, die die unterschiedlichen Sensoren charakterisieren. Welche Genauigkeit und welches Rauschverhalten lassen sich beobachten? Wie verhalten sich die Algorithmen zur Skeletterkennung? Was sind die Stärken und Schwächen der jeweiligen Systeme? Können daraus Empfehlungen für Einsatzszenarien abgeleitet werden oder lassen sich die Kameras kombinieren?

Am MMI steht bereits ein in Python programmiertes Framework mit Anbindung an die Bibliothek „OpenCV“ zur Verfügung, welches die wissenschaftliche Arbeit mit den beiden Kinect-Sensoren erleichtert. Hiermit soll hauptsächlich gearbeitet werden. Zusätzlich existiert eine stabile C++-Anbindung an ein 3D-Simulationssystem für die Kinect v1. Eine mögliche Veröffentlichung der Ergebnisse als Paper ist vorgesehen.
Stichworte: Kinect, Tiefenkamera, 3D-Kamera, Time-of-Flight, PMD, OpenCV, Python, C++
Betreuer: Atorf
Weitere Arbeiten
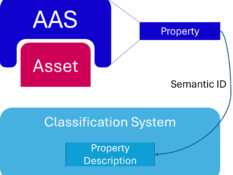
Klassifikationssystem für Merkmale Digitaler Zwillinge auf Basis der Industrie 4.0-Verwaltungsschale




Implementation of an Accelerated Projected Gradient Descent Solver for Multibody Dynamics Simulation




MA: Automatisierung der Verhandlung von digitalen Nutzungsrechten durch Self-sovereign Digital Twins






















































































