Methoden des „Simulation-based Control“ ermöglichen im Kontext der 3D-Simulationstechnik in Anwendungen der Robotik und Automatisierung den Entwurf und die Erprobung neuartiger, komplexer Steuerungsalgorithmen. Die wesentliche Idee des Konzepts besteht darin, die Entwicklung, Parametrisierung und Verifikation von Steuerungsalgorithmen zunächst in so genannten Virtuellen Testbeds durchzuführen bis die Steuerung bzw. der Beobachter das gewünschte Verhalten aufweist. Anschließend stehen die Ergebnisse dann direkt in einer minimalen Version desselben Simulationssystems bereit, um auf Basis der identischen Simulationsmodelle und -algorithmen die reale Hardware in Echtzeit anzusprechen. Damit stellt das Konzept einen integrierten Entwicklungsansatz zur Verfügung, der durch den Transfer von Simulationstechnologien auf die reale Hardware die Lücke zwischen simuliertem und realem Betrieb eines Roboters oder einer Anlage schließt. Dieser Entwicklungsansatz stellt damit aufbauend auf den Konzepten der eRobotik neue Methoden zur Beherrschung der stetig wachsenden Komplexität aktueller Problemstellungen in der Robotik und Automatisierung zur Verfügung.
Weitere Forschungsthemen
Viele klassische und althergebrachte (produzierende) Industriezweige in Deutschland sind dringend auf eine Digitalisierung angewiesen. Die...

Unbemannte Flugobjekte oder UAVs (Unmanned Aerial Vehicles) werden am Institut für Mensch-Maschine Interaktion in diversen...
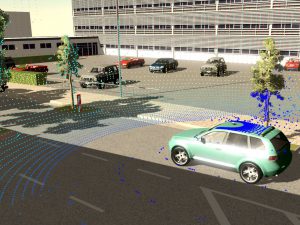
Die Entwicklung von immer fortschrittlicheren Fahrerassistenzsystemen und hochkomplexen autonomen Fahrzeugen stellt heutige Ingenieure vor immer...
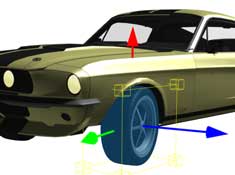
Zentrale Bedeutung unter den Simulationsalgorithmen hat die Simulation des dynamischen Verhaltens des mechanischen Systems.

Die "Virtuelle Inbetriebnahme" hat zum Ziel, komplexe Automatisierungsanlagen auf Basis digitaler Modelle und Methoden in...

Serviceroboter sind weltweit auf dem Vormarsch. Ihnen wird ein noch größeres Marktpotenzial vorhergesagt als den...

Sensoren sind zentraler Bestandteil nahezu jeder modernen (Automatisierungs-) Applikation.

Das Thema „Kinematik“ befasst sich mit der systematischen Beschreibung von Bewegungen und Bewegungsapparaten anhand ihrer...

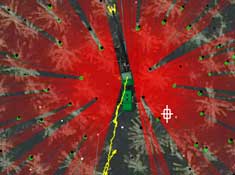
Die 3D-Simulation von Forstmaschinen ermöglicht ein gefahrloses und effizientes Training z. B. zum Zwecke der...

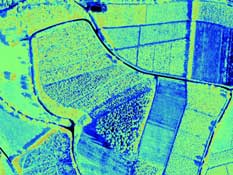
Mit dem Virtuellen Wald gehen in Nordrhein-Westfalen die sprichwörtlichen Zeiten, in denen man den Wald...

Beim Baumaschinensimulator steht die realitätsnahe Simulation der Maschinen selbst sowie insbesondere des Schüttgutes im Vordergrund....

Ein Leben ohne Satelliten ist mittlerweile nicht mehr vorstellbar. Ob zur Positionsbestimmung, zur Erdbeobachtung oder...
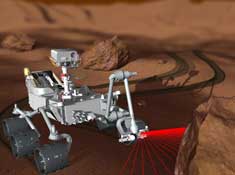
Roboter sind unverzichtbar bei der Erforschung von Planeten und der Exploration unseres Sonnensystems. Die Vororterkundung...

Mit der virtuellen Internationalen Raumstation hat das MMI ein umfassendes, begehbares und interaktives Modell der...

Ziel der Entwicklungen im Bereich eRobotik ist die Bereitstellung einer umfassenden Softwareumgebung zur Bearbeitung robotischer...
Modelle sind die Grundlage einer jeden Simulation und damit die Grundlage nahezu jeder eRobotik-Anwendung. Sie...
Eine wichtige Fragestellung bei der Realisierung unterschiedlichster Anwendungen ist die Bestimmung der absoluten Position einer...

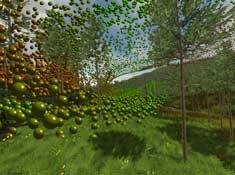
Ein zentraler Aspekt nahezu jeder eRobotik-Applikation ist die grafische Darstellung/Visualisierung des Simulationszustands...

Intelligente Mensch-Maschine Schnittstellen stellen eine der Schlüsseltechnologien für Anwendungen in der...
Im Jahr 2007 zog der Orkan Kyrill über Europa und verursachte allein in Nordrhein-Westfalen Waldschäden...

Virtuelle Testbeds legen die Grundlagen für die Realisierung neuer Kristallisationspunkte zur effektiven und effizienten Zusammenführung...

Nahezu alle Methoden der eRobotik basieren auf dem Einsatz moderner 3D-Simulationstechnik. Basis hierfür ist ein...
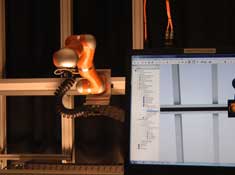
Methoden des "Simulation-based Control" ermöglichen im Kontext der 3D-Simulationstechnik in Anwendungen der Robotik und Automatisierung...
Die Entwicklung und der Betrieb autonomer Unterwasserfahrzeuge (AUV) ist eine komplexe, gefährliche und teure Aufgabe....

Bei der Mähdreschersimulation steht neben der realitätsnahen Simulation der Maschinen insbesondere die Simulation und Visualisierung...

Bei Virtual Reality-Anwendungen steht häufig das (audio-) visuelle Feedback der Simulation im Vordergrund. Für viele...
Handlungsplanung eröffnet neue Möglichkeiten der Interaktion zwischen Mensch und Robotern
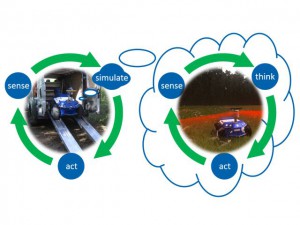
Das sogenannte Sense-Think-Act-Paradigma gilt als operative Definition eines (mobilen) Roboters...

Digitale Zwillinge - virtuelle digitale Repräsentanten physischer Assets - revolutionieren unsere Sicht auf Systeme.
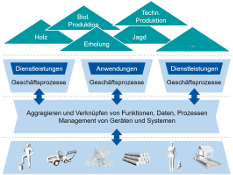
"Industrie 4.0"-Konzepte und -Methoden liefern dringend benötigte neue Ansätze, den Cluster Wald und Holz durch...


{kind=link}
{kind=link}