
In AsTeDiF wird ein Assistenzsystem zur Unterstützung des Maschinenbedieners in betrieblichen Trainings- und Anlernprozessen an einer Tuftingmaschine entwickelt. Grundlage hierfür… Weiter »
![]()
![]()



In AsTeDiF wird ein Assistenzsystem zur Unterstützung des Maschinenbedieners in betrieblichen Trainings- und Anlernprozessen an einer Tuftingmaschine entwickelt. Grundlage hierfür… Weiter »

Entwicklung einer neuartigen, digitalisierten Fertigungsstrategie für die automatisierte Produktion individualisierter FVK-Bauteile (IFVK) In dem Projekt IFVK wird ein Bauteilzwilling entwickelt,… Weiter »
Eine Tuftingmaschine bestickt ein Trägermaterial durch das Zusammenspiel von Nadel, Greifer und Phase. Das Einstellen erfolgt in vielen Fällen noch… Weiter »

Ein Bild sagt mehr als 1000 Worte, ein Video mehr als 1000 Bilder – und eine interaktive Simulation mehr als… Weiter »
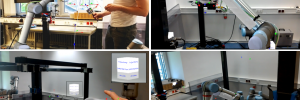
Basierend auf dem didaktischen FeDiNAR-Konzept werden mittels Digitaler Zwillinge der Lernenden und des realen Systems Handlungen erfasst, deren Konsequenzen simuliert und den Lernenden in AR visualisiert.
Im Projekt “ReconCell” wird eine neuartige Roboterzelle zur automatisierten Montage entwickelt, die mit zugehörigen Tools zur Prozessentwicklung und wirtschaftlichen Bewertung von Einsatzszenarien besonders die Bedürfnisse kleiner und mittlerer Unternehmen (KMU) adressiert.
Das Projekt SCALAB (Scalable Automation for Emerging Lab Production) hat zum Ziel, die Automatisierung des Bereichs der mikrooptischen Montage zu systematisieren.
Die Projektserie „ProPemo“ beschäftigt sich mit der Roboterprogrammierung „by Demonstration“, bzw. der 3D-Modellerstellung „by Demonstration“, d.h. indem ein menschlicher Bediener die Transport- oder Montageaufgaben vormacht. Zusammen mit Kooperationspartnern wie u.a. dem Werkzeugmaschinenlabor (WZL) der RWTH Aachen und einem Beraterkreis aus der industriellen Automation werden hier Methoden entwickelt, um den Einsatz von Robotern in kleinen und mittelständischen Unternehmen wesentlich zu vereinfachen und damit die Hürde der Einführung von Robotern in KMUs zu senken.
Ziel des DeLas-Projekts ist die deutliche Reduktion der Entwicklungszeit für die automatisierte Montage von Lasersystemen.
Das Projekt “IntellAct” addressiert das Problem, Objektmanipulationen auf der Signal- und der Symbolebene zu beschreiben und zu verstehen, so dass von Menschen vorgeführte Montageaktionen mit Robotern erlernt und wiedergegeben werden können.

