{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

Ein Bild sagt mehr als 1000 Worte, ein Video mehr als 1000 Bilder – und eine interaktive Simulation mehr als… Weiter »
![]()
![]()
Ein Bild sagt mehr als 1000 Worte, ein Video mehr als 1000 Bilder – und eine interaktive Simulation mehr als… Weiter »
Training und Validierung von KI-Algorithmen mittels massiv-paralleler Ausführung Digitaler Zwillinge

Die Entwicklung neuer Sensorhard- und -software im ViTOS-Testbed ist der erste Schritt im Lebenszyklus optischer Sensoren. Anschließend werden die einzelnen Hardwarekomponenten gefertigt, getestet und in das umgebende System integriert. Genau hier setzt ViTOS-II an.
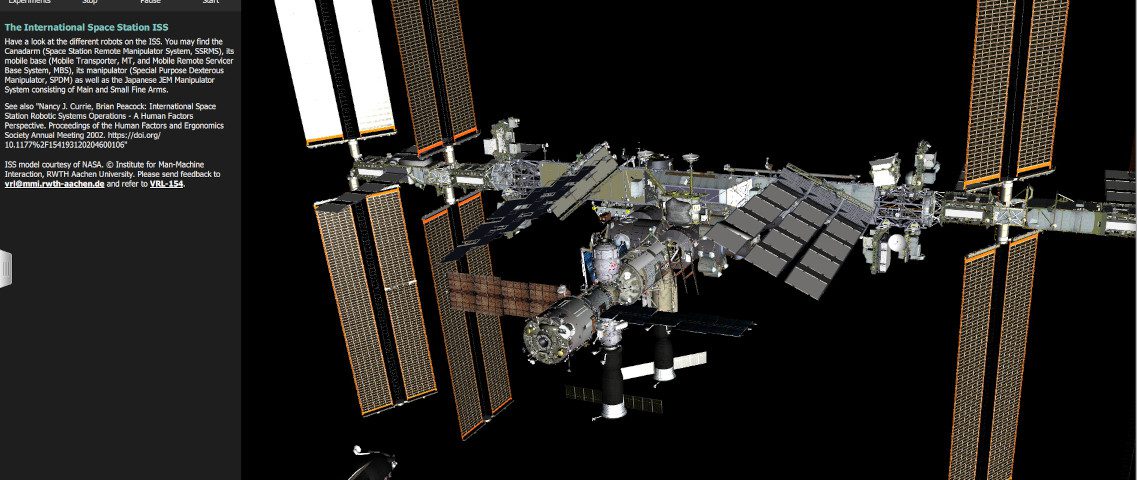
Heutige Satelliten sind meist monolithische Systeme ohne die Möglichkeit zur Wartung, Instandhaltung oder Rekonfiguration.
Im Rahmen des Projekts Virtual Crater wurde eine virtuellen Testumgebung entwickelt, die es ermöglicht, Robotersysteme kostengünstig in einer realitätsnah simulierten, lunaren Kraterlandschaft zu programmieren, zu testen und zu optimieren.
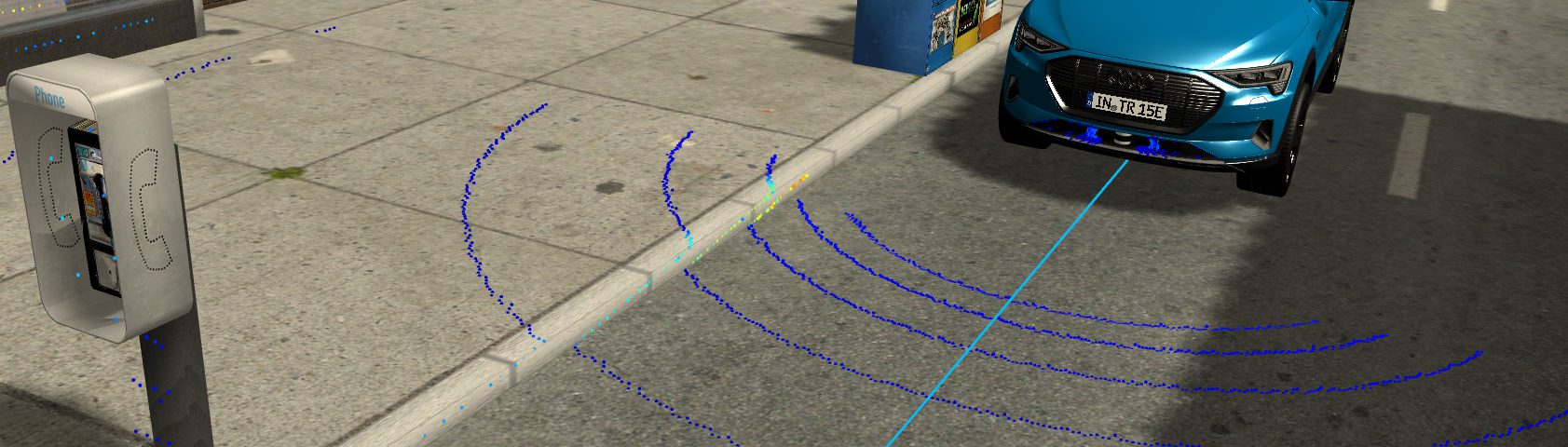
Optische Sensoren sind unverzichtbar in nahezu allen Raumfahrtanwendungen. Im Rahmen robotischer…
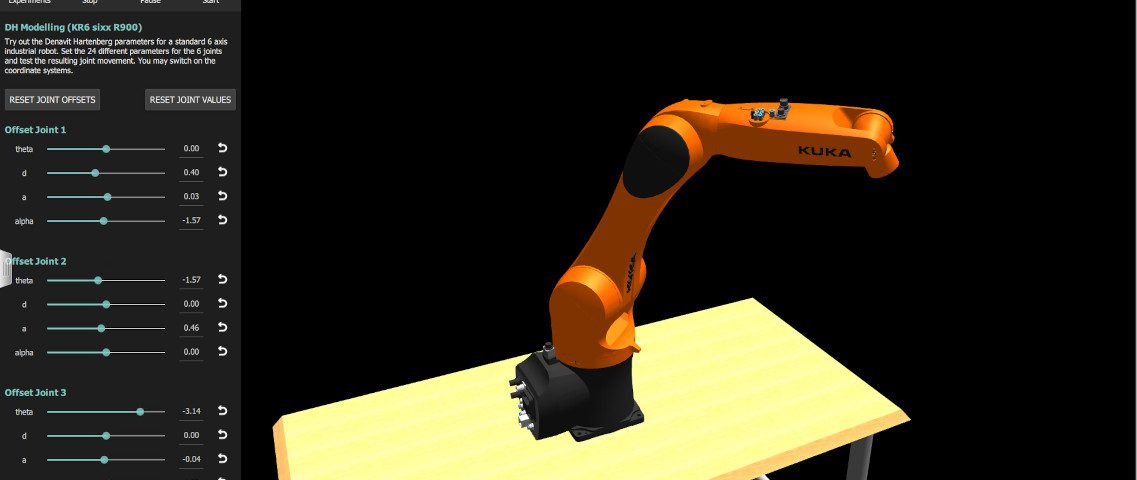
Grundlage für die im Rahmen von INVIRTES (Integrierte Entwicklung komplexer Systeme mit Virtuellen Testbeds auf der Basis zentraler Weltmodelle und moderner Konzepte der eRobotik) zu entwickelnden Methoden, Komponenten und Prozesse ist die Weiterentwicklung moderner Verfahren der eRobotik und hier insbesondere der Virtuellen Testbeds.
Eine wichtige Fragestellung bei der Exploration fremder Planeten durch in großen Teilen autonom agierende mobile Roboter ist die Bestimmung der absoluten Position dieser Systeme auf dem Planeten.
Im Projekt SELOK wurde untersucht, wie die Landmarken von einem mobilen Roboter abhängig von der Roboterposition u. a. mit neu entwickelten Laserscannern aus verschiedenen Perspektiven erfasst werden und zu einer lokalen Umgebungskarte zusammengefasst werden können.
Das Projekt “IntellAct” addressiert das Problem, Objektmanipulationen auf der Signal- und der Symbolebene zu beschreiben und zu verstehen, so dass von Menschen vorgeführte Montageaktionen mit Robotern erlernt und wiedergegeben werden können.

